
文章概述
文章旨在解决面向双异构空间众包场景的任务分配问题。基于聚合的思想,将预算充足的任务帮助预算匮乏的任务,以减少因预算不足造成的任务失败;考虑规划工人执行任务路径和优化分配,在最大化总的任务完成质量的同时最小化工人的移动距离。
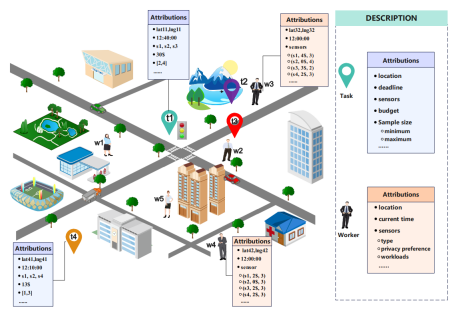
图 1 空间众包中双异构任务分配的场景
技术步骤
首先,基于位置和感知需求,将任务聚合为任务联合体并使其共享预算,以因预算不足造成的任务失败的概率。其次,提出一种带有时间约束的最短路径规划方法,以缩短参与者执行任务群的距离和成本。最后,在任务聚合和路径规划的基础上,分别从线性加权和距离收益角度,提出了两种具体的任务分配方法。
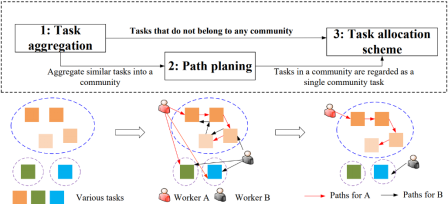
图 2 基于聚合的双异构任务分配算法框架
实验结果
大量实验结果表明,本文提出的基于聚合的双异构任务分配算法相较于基线算法在取得更好的任务完成质量的同时实现了较短的平均移动距离。同时,本文所提出算法的优势随着系统中任务(或工人)的数量的增加越来越显著。
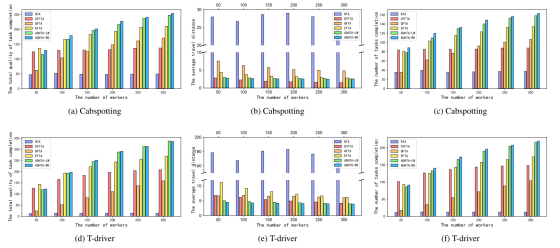
图 3 不同工人数量下的实验结果
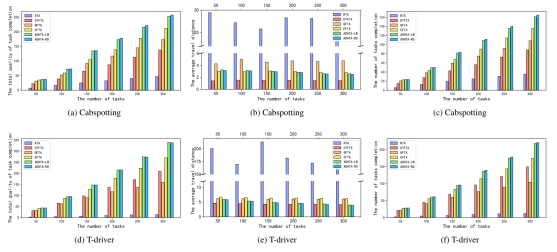
图4 不同任务数量下的实验结果
特别声明:本文转载来源“科学网”,仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的来源,并自负版权等法律责任;作者如果不希望被转载等相关事宜,请与我们接洽。